




 Qzone
Qzone
 微博
微博
 微信
微信

2020年7月8日-11日,由张江集团、优必选科技、软银集团旗下软银机器人、Watson Build 创新中心、机器之心联合组织的世界人工智能大会黑客松,首次以远程和小规模线下结合的方式举办,作为大会期间唯一一场黑客松大赛,以别开生面的竞赛形式和赛题吸引了来自全球顶级开发者同台竞技。经过三天不舍昼夜激烈的角逐,三大赛道优胜团队终于出炉并在WAIC开发者日主单元上进行了颁奖,比赛共计16支团队收获佳绩,优必选科技Walker仿真挑战赛则由来自耶鲁和密歇根州立大学的队伍以满分强势夺冠。
为了鼓励更多队伍能够充分参与人形机器人开发,优必选科技的Walker仿真挑战赛采用了远程线上形式,吸引了全球数百知名高校、研究院所及部分个人开发者的关注咨询,最终收到国内外34支顶级开发者队伍踊跃报名,8支队伍晋级八强。在颁奖典礼上,优必选科技CTO熊友军也在深圳给Walker赛道获奖选手送上了祝福。

优必选赛道颁奖环节

优必选科技CTO熊友军祝福获奖选手
优必选科技Walker仿真挑战赛:走进未来,研发共创
基于“让智能机器人走进千家万户”这一使命,2015年,优必选科技正式立项开始研发大型仿人服务机器人。2019年Walker机器人与美国波士顿动力的Atlas、AgilityRobotics的Cassie、日本丰田的T-HR3s、本田的E2-DR共同入选“值得关注5大人形机器人”。
Walker新一代身高1.45米,具备36 个高性能伺服关节以及力觉、听觉、视觉和平衡等全方位感知系统,可以全向行走,上下楼梯,具备踢球、舞蹈等多种运动能力,以及诸多家庭必备技能,如端茶倒水、开门关灯、弹琴作画等。
优必选科技Walker机器人
本次比赛优必选科技首开Walker核心模型及相关数据,面向全球开放报名,可谓人形机器人界的一大创举,同时大大降低了大型仿人服务机器人的研发门槛。
在赛题的设置上,也是颇具用心,以智慧家庭为主题,6大场景15项任务难度递进,全面考察选手运动控制、导航及视觉等多项人工智能及机器人技术的综合运用。考虑到比赛周期较短,主办方在赛题的难度分级上进行了充分考虑,使得参赛队伍可以尽快的上手平台的使用,完成一些初级的任务,同时富有余力的队伍可以尝试特别设置的挑战任务,解决人形机器人在真实世界中遇到的技术难点。

赛题介绍
具体到比赛任务来说,把Walker机器人放到实际场景中运行,本质是要去解决三个方面的议题,即“我在哪里”、“我要干什么”、“我怎么干”,这三大议题就归结到本次赛题所考察的的三大关键技术——定位导航、视觉、运动控制。
导航技术通过激光雷达、里程计、摄像头、IMU等传感器获取环境和自身信息,建立环境地图,确定机器人在环境中的位置,通过路径规划移动到目标点。针对人形机器人,视觉导航能够提供更广泛的颜色、特征点、深度图等环境信息,是未来导航的主要发展方向。本次比赛中,优必选科技开放了Walker头部,胸部和腰部的多处摄像头数据,主要考察参赛队伍开发视觉导航相关算法,完成机器人自主行走到任务点执行任务场景的能力。
视觉技术通过机器人上的摄像头获取到的数据,进行图像处理、模式识别和图像理解,对目标物体进行监测、识别、跟踪等处理,让机器人能够观察和理解环境。Walker具备多个可以提供不同维度信息的摄像头,为参赛队伍充分利用周边环境来获取执行任务所需的反馈信息提供了可行性。比赛中优必选科技设置了机器人随机出现在任务点附近的方式,机器人通过视觉相关算法,定位到所需操作的物体,通过手眼协调操作完成任务。
运动控制技术通过综合力觉、视觉、IMU等信息,按照一定的系统模型和期望,协调控制多个伺服关节按照期望的方式一起运动,使得机器人可以稳定地运动起来并完成对物理环境的改变。Walker具备7自由度的冗余机械臂和6自由度的足式腿,可以灵活地适应人类家居环境,完成稳定的行走移动和灵巧的抓取操作。
具体来说,在抓饮料罐场景下,涉及导航、视觉与控制三个技术方向,是综合应用场景。该场景中,参赛选手需要依据VSLAM技术对机器人定位,利用已知机器人位姿与地图,规划机器人走到任务点;采用视觉方案识别指定饮料罐及其位姿,控制机器人走到合适的位置,使水杯在机器人手臂的可达空间范围内;最后,采用手臂规划与视觉伺服控制手掌到达指定的位姿,并抓取饮料罐。
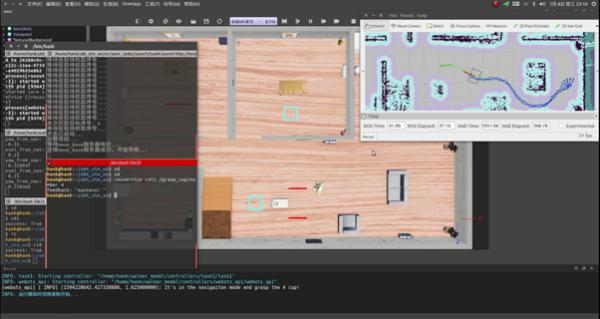
比赛中采用VSLAM规划机器人路径

比赛中采用视觉伺服方案抓取水杯
在这个任务中,WalkerUp!队伍在完成该任务中比较突出,在短短一个月的时间内,充分利用现有资源做为基础框架,如orb-slam2,分析双目相机与RGBD深度相机在该框架下的优势,提出改进方案。Walker的手臂具有七个自由度,而且肘部带有偏置,常规的基于臂形角的七自由度机械臂求解方法在 Walker上并不能直接应用。Critical HIT队采用将其中一个关节固定,将该问题转换为求解六自由度机械臂逆解,采取该种方案能够有效的降低求解的难度,然后通过遍历的方案获取合理的解,该种思路有效的提升解决问题的效率。
在开冰箱场景中,同样涉及导航、视觉与控制三个技术方向,是综合应用场景。该场景下,同样需要参赛选手们对机器人定位与导航,并控制机器人走到合适的位置;然后,采用视觉方案,识别出冰箱的门把手及其位姿,并选取合适的抓取位姿;最后,采用全身运动规划、步态规划、末端稳定控制及柔顺控制等方案实现打开冰箱门。
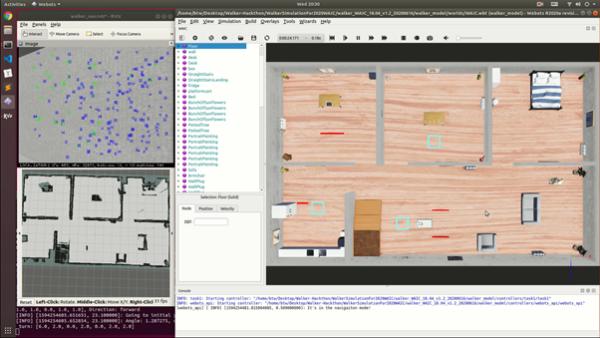
比赛中视觉导航全局路径规划

在该任务中,TheWalkingDead队伍在导航中最大的特点是依据全局地图设置关键帧,并开发了一个支持以全局位置,姿态作为输入的步伐规划库,这使得开发基于关键帧的路径规划算法变得轻松。TheWalkingDead在开冰箱门时,规划手掌位姿抓取冰箱门把手,依据腿部运动补偿腰部浮动基座运动,确保末端位姿的稳定,我们看到机器人抓冰箱门的手始终没有离开门把手。在机器人边走边拉开冰箱门的过程中,最难的是机器人手掌规划的轨迹很难与门打开时门把手的运动轨迹重合,TheWalkingDead采用力控方案,有效的避免了机器人与冰箱之间产生内力,提升了机器人在拉冰箱行走时的稳定性,给人一种踏实稳健的感觉。
在搬箱子场景中,任务分为搬起箱子与搬着箱子后退到红线外两部分。该任务主要考察选手的规划与控制能力,需要选手们自行设计步态算法与平衡控制器,确保机器人在搬起箱子与行走时的稳定性。

比赛中搬箱子后退行走

在该任务中,冠军队伍TheWalkingDead表现依然出色,非常稳定的搬起了箱子并后退到红线以外。TheWalkingDead采用LIP模型进行步态规划,实现了Walker的稳定行走。在该任务中搬起箱子并保证Walker的稳定是最难的,TheWalkingDead非常巧妙的在搬箱子的同时质心往后移动,保证了箱子在离开桌面时的稳定性;同时优化行走步态算法,保证机器人在搬箱子时依然健步如飞。
具体比赛中的研发细分场景还有很多,有队伍表示:“一个爬楼梯,我连续写了3个17小时”,可见本次赛题任务真的不简单,同时也说明了大型仿人服务机器人的研发难度。
除了选手精彩的研发任务比拼以外,值得一提的是,也正因为比赛为线上形式,招募队伍覆盖全球,决赛八强来自耶鲁大学、密歇根州立大学、华中科技大学、香港中文大学、哈尔滨工业大学(深圳)、南方科技大学等世界知名高校,赛题任务完成度也很高。这也与优必选科技在人工智能&机器人高校教育领域的多年布局密不可分。
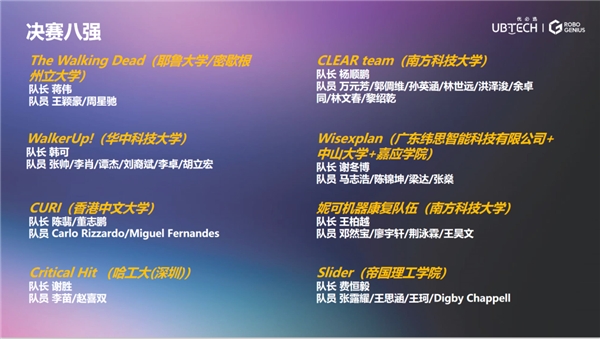
优必选科技决赛八强
优必选科技高校教育事业部总经理齐建伟表示:“这只是一个开始, Walker仿真平台作为一个赛项在全球范围内的公开亮相代表了我们助力高校教育的决心。我们会继续为老师和同学们提供更好的机器人科研和教学平台,助力高校在人工智能与机器人领域的发展。”









贵州体育在线2022-05-26 09:1105-26 09:11

泡泡网2022-05-26 09:1105-26 09:11

驱动中国2022-05-26 09:0805-26 09:08

南方娱乐网2022-05-26 08:5905-26 08:59

南方娱乐网2022-05-26 08:5805-26 08:58

电影界2022-05-26 08:5805-26 08:58
京娱网2022-05-26 08:5805-26 08:58






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>
















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报