




 Qzone
Qzone
 微博
微博
 微信
微信
『激光雷达是自动驾驶汽车的核心传感器,能够弥补摄像头在精度、稳定性和视野方面的局限性。目前车载激光雷达已经到了比拼量产能力的阶段,谁更具成本优势,谁将占领市场』
近期,激光雷达最近又火“出圈”了。先是马斯克因为激光雷达与何小鹏打口水仗,再是北汽新能源副总经理、ARCFOXBU总裁于立国宣布明年将推出搭载激光雷达的量产车型。有趣的是,在汽车圈动作不断的华为开始密集释放关于量产车规级激光雷达的消息,在广州车展期间,华为智能汽车解决方案BU总裁王军表示,华为的激光雷达已经成车企抢购的爆品。
“高冷”的车载激光雷达让整个新能源以及高级别自动驾驶行业有了新的“热点”。
激光雷达上车,将成高级别自动驾驶汽车标配?
是否需要搭载激光雷达,一直是自动驾驶领域争论的焦点之一。
那么自动驾驶怎么实现的呢?简单的说,就是给车加上智能驾驶模块,再连上通信网络。这个模块主要有三大核心功能:环境感知—计算决策—控制执行,分别对应于人的「眼睛-大脑-神经」。
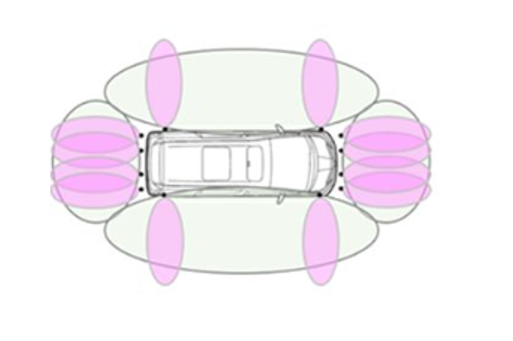
而对自动驾驶来说,环境感知处于重要地位。在自动驾驶架构中,感知被比作为汽车的“眼睛”,包括车载毫米波雷达、车载激光雷达和车载超声波雷达等雷达系传感器,以及车载摄像头等视觉系传感器。
在目前,关于感知基本可以分为两种不同路径:第一种视觉方案派,以摄像头为主要工具,配合毫米波雷达等低成本元件组成;第二种便是雷达方案派,由激光雷达主导,配合摄像头、毫米波雷达等组成。
两种方案哪种更合适?
车载摄像头的主要优点在于其分辨率高、成本低,人眼能够快速捕捉海量信息,摄像头也能够获取丰富的信息,但和人眼一样受视野和环境影响。一个单目摄像头最多能捕捉到50°范围内,能观察的距离有限;在夜晚和雨雪等恶劣天气下摄像头的性能会迅速下降。
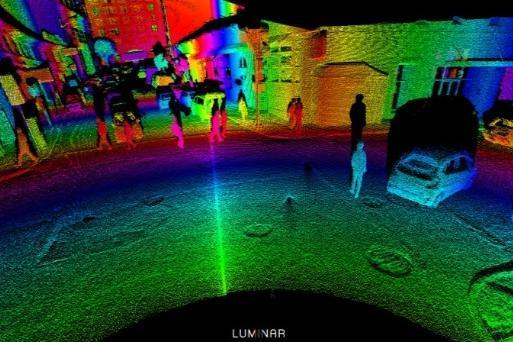
激光雷达弥补了摄像头环境信息感知的不足,其最大优势在于能够利用多谱勒成像技术,创建出目标清晰的3D图像。通过测量激光信号的时间差和相位差确定距离,并利用此过程中收集到的目标对象表面大量密集的点的三维坐标、反射率和纹理等信息,快速得到出被测目标的三维模型以及线、面、体等各种相关数据,以达到环境感知的目的。
相对摄像头来说,激光雷达能有效识别分辨平面和立体,得到相对完整的空间信息,同时探测精度、信息丰富程度和对外界的实际感知都更强大,但由于激光雷达属于精密仪器,头部企业在相关领域都有多年的深耕和积累,且成熟的产品具备很高的精度,导致激光雷达成本较高、价格更贵。
对于以特斯拉为代表的纯视觉方案拥护者而言,商业成本是一个重要的考量因素,安装昂贵的激光雷达会明显提高单台汽车的售价。特斯拉认为,人类通过视觉收集信息+大脑处理信息的方式进行安全驾驶,意味着自动驾驶也能通过同样视觉感知+算法决策来实现,其坚持以图像识别为主导,通过覆盖全车的摄像头+超声波传感器和前置雷达以实现高级别自动驾驶场景。
对于以主流自动驾驶厂商为代表的激光雷达拥护者,把系统的安全可靠性排在首位,认为实现这一方向的方式就是融合各个性能的传感器,以弥补不同类型的技术漏洞。采用激光雷达的自动驾驶厂商一般选择配置1-3个激光雷达,用于障碍物和移动车辆检测,同时在车四周环绕成本相对较低的低线束激光雷达或毫米波雷达进行视野补充。
在今年发布的全新一代奔驰 S 级上,激光雷达也成了一个被看重的硬件:搭载了5个毫米波雷达、1个前视双目摄像头、6个摄像头,还有12个超声波雷达,而为了高阶自动驾驶,在车头处还配备 1 个激光雷达,以实现L3级自动驾驶。BBA们的坚持,让汽车圈有着一种观点:不管是作为主传感器,还是作为安全冗余备份,激光雷达将是汽车实现L3级及以上自动驾驶不可或缺的传感器。
激光雷达上车国内造车新势力尝鲜,ARCFOX极狐HBT或率先量产
毋庸置疑,成本是制约激光雷达普及的主要原因。由于国外技术公司的长期垄断,搭载激光雷达的汽车价格居高不下,这让全无人驾驶出租车公司成为其主要买家,而普通消费者对该车型的购买则凤毛麟角。
然而,这个趋势正在逆转。
华为轮值董事长徐直军曾对外分享了华为上车的宏图,明确表示,华为要造激光雷达、毫米波雷达等智能汽车核心传感器,打造新的传感器生态。
华为方面表示,ADS“高阶”自动驾驶方案将采用L4级自动驾驶技术打造,使用2到3个车规级100线混合固态的激光雷达,配合十几个摄像头和6个毫米波雷达,丝毫不输L4级无人出租车。“L4当L2用”的不计成本的规划,可能是让自动驾驶更快落地的路线之一。

华为智能汽车解决方案BU总裁王军更是放出一个重磅消息:华为有1万人在造激光雷达。目标是短期内迅速开发出 100 线的激光雷达。并且在未来将激光雷达的成本降低至200美元(约 1390 元人民币),甚至是100美元(约 695 元人民币)。
除了关注价格和车规外,激光雷达真正要进入量产车,智能化和软件感知算法将是更大的挑战。对于自动驾驶环境感知,传感器硬件通常只完成了数据收集的工作,要真正获取交通参与者方位、类别、速度、姿态等信息,必须经过感知算法的实时计算分析。感知算法的优劣直接决定对交通参与者的检出率、感知准确度和感知距离。如果感知算法性能不足,即使雷达硬件线数再高,也无法获得优质的感知结果,所以说感知算法是激光雷达感知系统的“第二个核心”。而这也正是华为的优势所在。
与此同时,国内很多汽车主机厂也在近期公布了激光雷达上车的方案:广州车展上,小鹏汽车公布了下一代自动驾驶架构的软硬件升级计划,并称将在2021年,率先在全球推出首款搭载激光雷达的量产智能电动汽车。蔚来汽车也表示,激光雷达有可能出现在未来的全新纯电动轿车中。
而ARCFOX极狐更是近乎官宣激光雷达车型即将上市。在世界互联网大会“互联网汽车乌镇夜话”论坛上,北汽新能源副总经理、ARCFOX BU总裁于立国透露:“ARCFOX极狐和华为联合打造的ARCFOX极狐最新款产品HBT将明年上市。新车搭载3颗96线激光雷达、6个毫米波雷达、12个摄像头、13个超声波传感器,华为提供的芯片算力达到352万亿次每秒。”这番发言更是坐实了华为激光雷达上车的传言,华为此前关于自动驾驶的方案将在HBT车型上率先落地。

关于自动驾驶路线选择的争议由来已久,目前看,尽管高级别自动驾驶距离落地仍有一段时间,但随着明年ARCFOX极狐、小鹏等激光量产车型的竞相上市,这必将助推激光雷达市场的快速成长,激光雷达未来可期。“激光雷达的制造商变多了,更多车厂开始使用激光雷达,这可能比讨论技术路线更有说服力。”知名业内人士表示,“实践才是检验真理的唯一标准”。







TOM2022-05-26 11:1005-26 11:10

猎云网2022-05-26 11:0005-26 11:00

贵州体育在线2022-05-26 10:5605-26 10:56

前瞻网2022-05-26 10:2005-26 10:20
猎云网2022-05-26 10:0405-26 10:04

行车视线网2022-05-26 10:0005-26 10:00
盖世汽车网2022-05-26 09:3005-26 09:30






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>
















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报