




 Qzone
Qzone
 微博
微博
 微信
微信


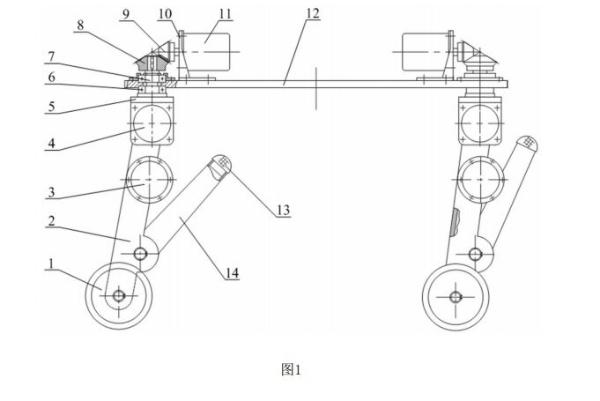
2月19日,中国矿业大学公布一项名为“一种轮腿混合驱动式矿用变胞机器人”的专利,该专利于2020年11月18日,申请公布号为CN112373594A。
从背景技术来看,根据移动方式的不同,移动机器人分为轮式、腿式、履带式和混合式等多种形式。一般轮式移动机器人结构简单、速度快,但在非结构化环境下其越障能力和平稳性存在很大缺陷;而腿式移动机器人具有较强的地形适应能力,但一般结构复杂难控制、不易满足设计中高灵活性的要求。
本发明的一种轮腿混合驱动式矿用变胞机器人,包括承载平台、四个轮腿行走机构,所述轮腿行走机构包括有轮腿支链和转向装置;轮腿支链包括有支座,支座两侧设置有安装板,安装板上分别安装有电机二和电机四,电机二连接有大腿杆,大腿杆底端转动连接有车轮轴,电机四上连接有带轮组件一,电机四连接并驱动车轮轴,车轮轴上连接有车轮;所述大腿杆安装有电机三并铰接有小腿杆,电机三连接并驱动小腿杆;所述转向装置包括有连接在支座上的回转轴,所述支座通过回转轴与承载平台转动连接,所述回转轴上连接有电机一。
本发明融合了轮式移动机器人高速、高效性和腿式移动机器人复杂地形高适应性的特点,提升了机器人的越障能力,增大了作业范围。
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)







泡泡网2022-05-24 19:4805-24 19:48

南方娱乐网2022-05-24 19:2405-24 19:24

猎云网2022-05-24 17:5705-24 17:57

北京商报网2022-05-24 17:3005-24 17:30






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>




















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报