




 Qzone
Qzone
 微博
微博
 微信
微信


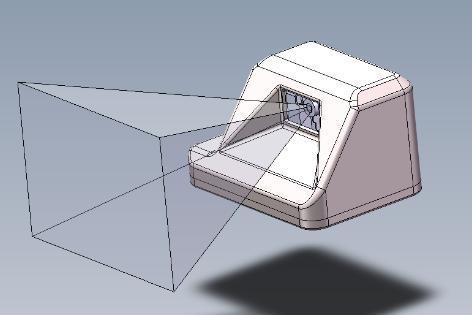
2月23日,广州小鹏自动驾驶科技有限公司公开“一种越障方法和装置”专利,该专利于2020年11月17日申请,申请公布号为CN112389422A。
尽管如今已有自动泊车技术,但受限于停车位内常常出现障碍物,如减速带、凹坑、砖块等,在自动泊车过程中,往往只能靠车辆惯性通过障碍物;但因为泊车过程车速较低,当障碍物高度较高和斜面倾角较大时候车辆容易被挡着而难以靠惯性通过,此时需要电机输出更大扭矩才能通过。然而不同障碍物所需的扭矩不同,且在泊车过程中难以检测这些障碍物的类别,因此无法保证车辆能够越过所有的障碍物。
本发明实施例提供了一种越障方法和装置,所述方法包括:在自动泊车过程中检测到障碍物时,获取当前的泊车场景,所述泊车场景依据车辆与泊车区域的位置关系确定;从预先设置的障碍物通过能力信息中,查找与所述当前的泊车场景匹配的目标障碍物通过能力信息;依据所述目标障碍物通过能力信息控制车辆通过障碍物;由于不同泊车场景中的障碍物不同,因此针对不同泊车场景采用不同的障碍物通过能力,能够有效的控制车辆越过障碍物;从而提高自动泊车过程中车辆针对障碍物的通过性。
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)

泡泡网2022-05-24 19:4805-24 19:48

南方娱乐网2022-05-24 19:2405-24 19:24

猎云网2022-05-24 17:5705-24 17:57

北京商报网2022-05-24 17:3005-24 17:30






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>


























 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报