




 Qzone
Qzone
 微博
微博
 微信
微信

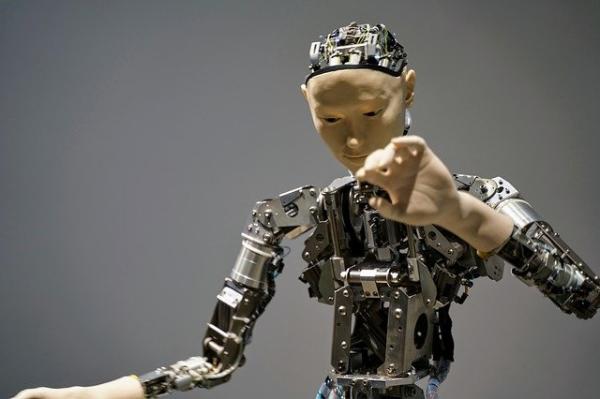
康奈尔大学的研究人员发明了一种低成本的方法,让机器人不通过触觉,而是通过捕捉影子运动,就能感受到“触摸”。
研究于去年12月20日发表在《PACMCGIT》(ACM会议关于互动、移动、可穿戴及无处不在的技术论文集)上,标题为“ShadowSense: Detecting Human Touch in a Social Robot Using Shadow Image Classification”(阴影感:基于阴影图像分类的社交机器人触觉检测),第一作者为康奈尔大学的Yuhan Hu。
利用不同接触行为对光线的影响不同,研究人员在机器人的皮肤下放置了USB摄像头,与电脑相连。电脑上运行着神经网络算法,利用海量的训练数据,通过不同的阴影特征,区分6种触摸手势——掌触、拳打、双手触摸、拥抱、指点和完全不触摸。具体取决于光照,算法准确率可以达到87.5%-96%。
译/前瞻经济学人APP资讯组
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)

lookin2023-03-15 19:0203-15 19:02

lookin2023-03-15 18:1403-15 18:14

威锋网2023-03-15 20:1803-15 20:18

热点科技网2023-03-15 20:1803-15 20:18
威锋网2023-03-15 20:1703-15 20:17

威锋网2023-03-15 20:1403-15 20:14

娱乐中国2023-03-15 20:1403-15 20:14

娱乐中国2023-03-15 20:1103-15 20:11






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>
















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报