




 Qzone
Qzone
 微博
微博
 微信
微信


3月2日,上海交通大学公开“基于量子计算线路和LiDAR点云分类的物体识别方法”的专利,涉及无人驾驶领域,该专利于2020年12月4日申请,申请公布号为CN112434637A。
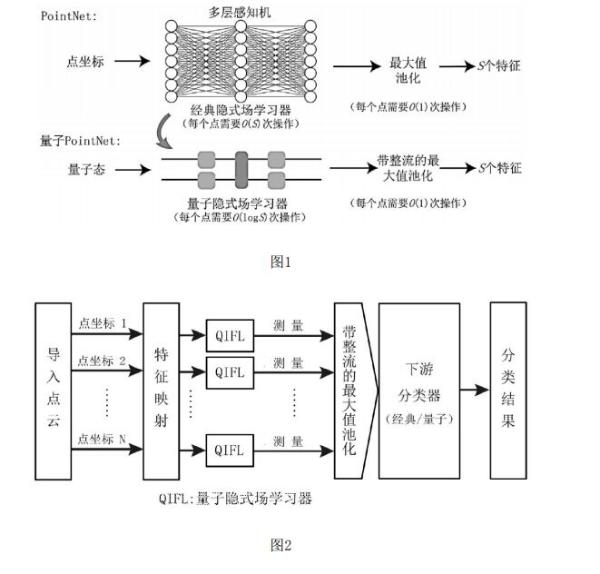
根据背景技术,现有的对象分类的技术中,对于LiDAR传感器采集到的点云通常基于PointNet深度学习模型进行处理,其主要问题在于:该任务具有采集到的点云中点数量较多、实时性要求较高的特点,使用经典方法往往无法完成高效率的计算。
根据专利摘要,一种基于量子计算线路和LiDAR点云分类的物体识别方法,采用LiDAR传感器扫描自动驾驶车辆待识别的物体并得到该物体点云坐标组成的点云网络,通过特征映射转化为量子态后输入PointNet机器学习模型,将点云网络中的逐点运算抽象为生成隐式场,最后对所有概率分布进行带整流最大值池化操作,得到点云的全局特征向量并输入神经网络分类器进行分类,可得到分类结果,实现物体识别。
本发明通过对三维机器视觉中PointNet模型的量子化延拓,可以对逐点处理过程实现指数加速,同时在网络终端可以获得一个受量子强化的特征空间。
更多相关数据请参考前瞻产业研究院《2021-2026年中国知识产权服务行业市场前瞻与投资战略规划分析报告》。同时前瞻产业研究院提供产业大数据、产业规划、产业申报、产业园区规划、产业招商引资、IPO募投可研等解决方案。
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)











lookin2023-03-15 19:0203-15 19:02

lookin2023-03-15 18:1403-15 18:14

威锋网2023-03-15 20:1803-15 20:18

热点科技网2023-03-15 20:1803-15 20:18
威锋网2023-03-15 20:1703-15 20:17

威锋网2023-03-15 20:1403-15 20:14

娱乐中国2023-03-15 20:1403-15 20:14

娱乐中国2023-03-15 20:1103-15 20:11






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>












 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报